首页
业界
前端
运维
建站
软件
生活
后端
创投
运营
硬件
电商
投稿
首页
业界
前端
运维
建站
软件
生活
后端
创投
运营
硬件
电商
首页
›
文章标签 "小学生入门激光SLAM<六>"
3D激光SLAM-Loam
小学生入门激光SLAM<六>
小学生入门激光SLAM<六>、3D激光SLAM-Loam
1、3D激光SLAM 1.1、基于Point to Plane ICP的帧间匹配 1.2、基于3D描述子ICP的帧间匹配 1.3、基于NDT的帧间匹配 2、LOAM 2.1、里程计 &n ...
风君子
软件
2023-08-23
52
最新文章
31分钟前
linux查看本机ip地址(linux 查看本机ip)
安卓版手机下载乌托邦(安卓版手机qq2013)
31分钟前
linux哪个好用(linux 哪个好用)
31分钟前
web防护是什么意思(web防护和ddos防护)
31分钟前
磊科网络(ddos磊科)
31分钟前
(linux下载tar)
32分钟前
ddos攻击目标有哪些(ddos攻击的目标)
32分钟前
安卓图标提示怎么关闭(安卓图标提示)
32分钟前
安卓英英词典app(英英词典安卓)
32分钟前
苹果遭4000万英国iCloud用户集体诉讼,面临30亿英镑索赔
2小时前
标签
APP
iphone
IT资讯
三星
业界
中国
京东
信用卡
借款人
利息
利率
办公软件教程
华为
处理器
小米
微软
快科技
手机
投资理财
支付宝
教程
显卡
智能手机
比亚迪
汽车
游戏
特斯拉
理财知识
电动车
电脑
科技
秘籍
程序
美国
股票
腾讯
芯片
苹果
荣耀
贷款
路由器
银行
银行卡
额度
马斯克
热评文章
2024-11-07
12
海信领跑中国电视市场:10月出货量夺冠,小米跌至第三
2024-11-07
10
消息称现代汽车集团前三季度营业利润超过大众 在汽车行业仅次于丰田
2024-11-07
10
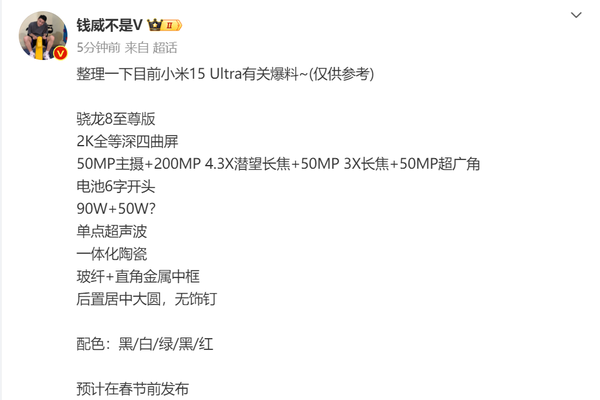
小米15 Ultra爆料汇总:2亿潜望+骁龙8至尊版+2K屏
2024-11-07
6
苹果明年升级Apple Intelligence服务器:或将采用全新M4芯片,聚焦安全与隐私保护
2024-11-07
12
厕所英语怎么说(厕所英语单词怎么读)
关注我们的公众号